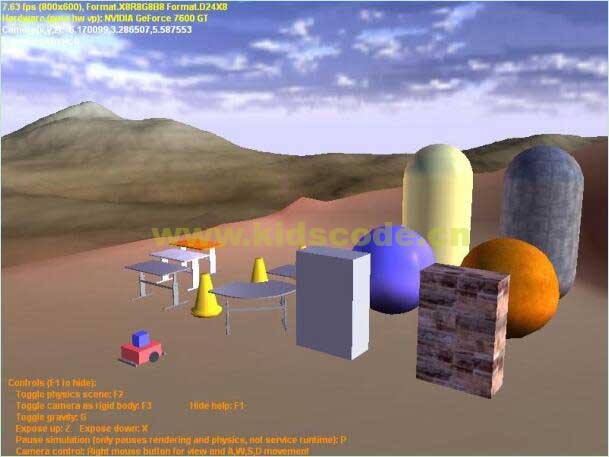
机器人3D仿真环境
在机器人的程序设计中,仅仅完成代码的编写还不能够算是真正设计出一套可用的程序,还需要结合机器人实际工作进行调试,从中发现问题并加以改进,在乐高机器人的设计中,我们也经常遇到环境光值测量、电机马达调速、运动姿态纠正等调试工作,因而脱离了机器人实体,我们很难保证设计程序的可靠性,然而,在很多情况下,受到条件限制无法得到真正的机器人用来调试,因此,在微软机器人工程平台中所提供的机器人3D仿真软件正好解决了这个矛盾,方便了手头没有机器人的程序员在这个虚拟的环境中调试机器人。这款3D仿真软件中使用了多用于游戏开发中的AGEIA PhysX ®Technology虚拟物理环境技术,使得仿真效果更加逼真,但是虚拟场景毕竟与真实环境不同,有许多隐藏的物理因素,像噪声干扰等不能完全被模拟在软件中,因而通过仿真环境调试下的机器人与实际机器人的工作情况仍有不同。
本站内容未经许可,禁止任何网站及个人进行转载。