-

-
68.88万 0
以后的程序编写中只须引用Sensor Value(lightSensor)命令便可实现对该光电传感器的访问,当完成了所有的这些设置后,软件自动地会在程序的开头处生成一段与用户所定义传感器相对应的C语言...
-

-
64.99万 0
了解了那么多关于RobotC的功能特性和编程调试工具之后,我们就来实践动手操作一下RobotC的编程方式,看一看用RobotC的C语言编程与Robolab的图标方式编程有何不同。...
-
-
58.54万 0
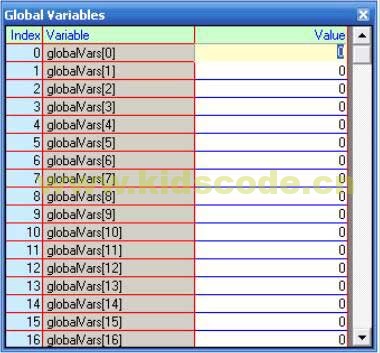
变量的变化呢?现在,RobotC就提供了这样一个功能,通过Global Variables窗口,我们...
-
-
57.66万 0
和调试工具,这个重要的工具对于乐高机器人的爱好者来说,特别是想研究NXT高级功能的用户是非常合适的。...
-
-
67.09万 0
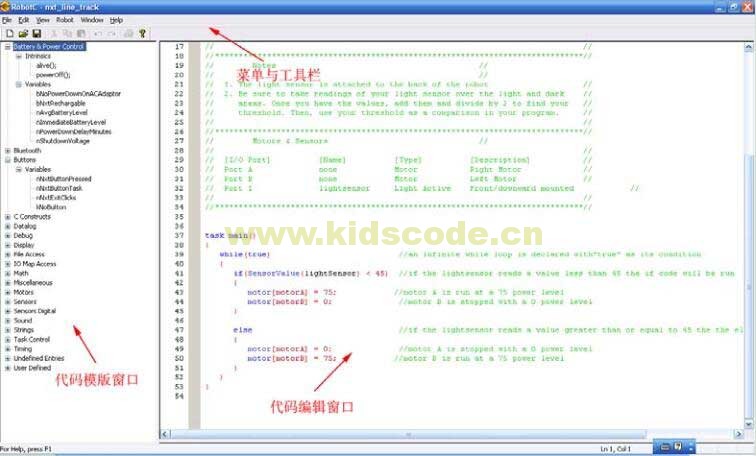
达、传感器、判断等程序模块,取而代之的是一个较大空间的程序代码编辑窗口和一些基本工具栏。 ...
-
-
61.66万 0
件。作为支持多机器人平台的开发环境,它即可以方便机器人爱好者们使用代码的方式给乐高机器人编程,又可以...
-
-
58.67万 0
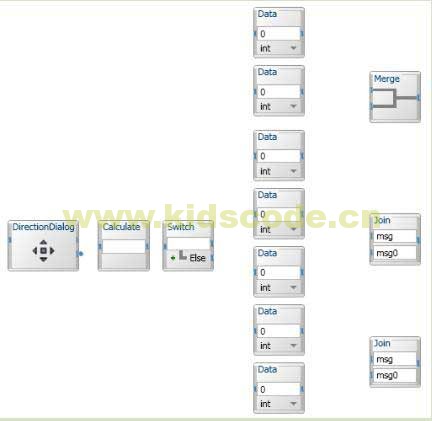
ies)中依次将计算机(Calculate)模块、条件选择模块(Switch)、数据模块(Data)...
-

-
55.43万 0
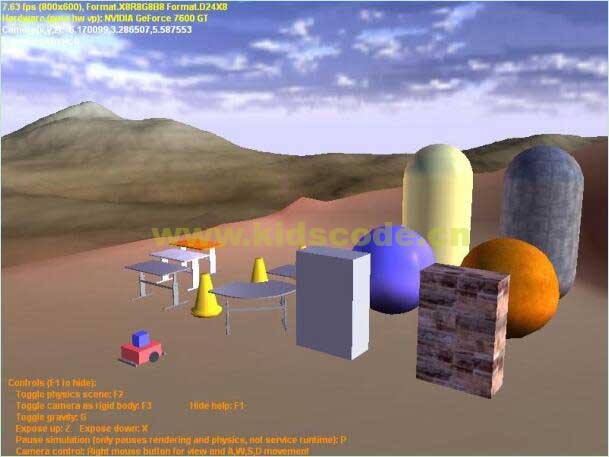
这个程序中,我们的乐高NXT机器人将使用2个电机马达、一个NXT控制器并且和一个能在计算机上运行的民...
-
-
58.89万 0
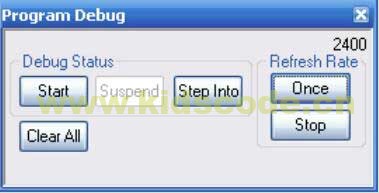
经常遇到环境光值测量、电机马达调速、运动姿态纠正等调试工作,因而脱离了机器人实体,我们很难保证设计程...
-
-
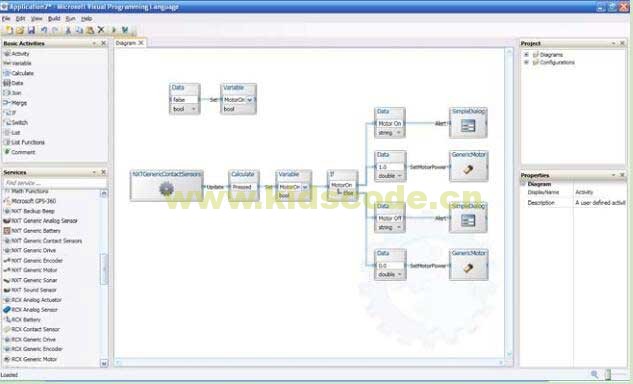
58.08万 0
专业程序员在简单的图形编程环境中轻松编写机器人程序。这套基于数据流的可视化编程工具Visual Pr...



QQ学习群:751252616 759226716
QQ行业群:202818485 434219048
微信公众号:kidscode_cn,二维码 ![]()
-
-
38 0
-
-
93 0
-
-
158 0
-
-
208 0
-
-
217 0
