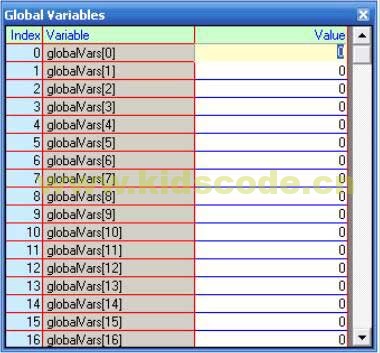
Global Variables (全局变量)
当我们编写程序时,不可避免地在程序中需要用到各种变量来暂存传感器的读数或辅助各类的数据计算,但你有没有想过在机器人程序运行时观察一下这些变量的变化呢?现在,RobotC就提供了这样一个功能,通过Global Variables窗口,我们可以在程序运行时,监测255个你所定义的全局变量的数值,这样一旦你发现程序计算的结果与预期有差异时,就可以通过观察全局变量的变化情况,跟踪程序的运行过程,进而进行调试与纠错。
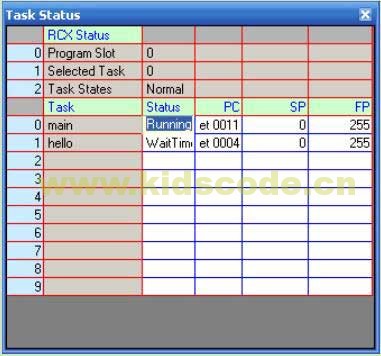
Task Status (任务状态)
与前面介绍的Global Variables监测窗口类似。在编程中,除了会定义较多变量之外,我们也习惯将机器人要完成的不同任务使用不同函数或过程进行区分,做成一个个任务某块的方式,方便相互调用。在RobotC中,我们同样可以采用Task 的任务方式将这些程序区分开。通过Task Status 窗口便能够在程序运行时同时监测多个任务的运行情况,并在窗口中显示各个任务的PC地址指针和SP堆栈指针,这些指针数据都将会随着程序的运行而发生变化。对于乐高机器人的高级用户或C语言爱好者来说,探究程序的运行状态是一件有意义的事,同时也能提高自己对于C语言工作原理的理解。

File Management(文件管理)
在全新的NXT机器人中,已经不再像过去的RCX机器人仅能储存5个程序。NXT的程序存储数量是没有限制的,因而如何有效得管理这些在NXT机器人上的文件,包括程序文件、声音文件、系统文件等,就显得十分重要。正因为如此,在RobotC中提供的文件管理器工具也将会成为我们日后管理NXT机器人程序在好帮手。通过文件管理器工具,我们能够在连接NXT机器人后看到当前已存于NXT上的文件名称、文件类型和文件大小。同时,利用其提供的多种功能按钮,我们可以实现程序的运行、停止,文件的下载、删除等功能。有趣的是,这个文件管理器还具备文件上传的功能,即选中某个存于NXT里的文件之后,我们可以通过Upload将该文件从NXT机器人上传至我们的计算机中进行编辑,这一功能在同类的乐高机器人软件中是不多见的。

本站内容未经许可,禁止任何网站及个人进行转载。