Microsoft Robotics Studio
走近微软机器人工程开发平台
大家在乐高机器人的设计搭建中一定发现了其上百种机械零件,多种电子传感器和电机可以任意组合成各种机械结构、自动化系统,因此凭借如此的灵活性和多样性,乐高机器人无疑已经成为从小学到高校,甚至研究机构的首选实验器材和教学工具,正是因为有着如此巨大的优势,以及乐高机器人在世界上的知名度和普及程度,所以成为微软在机器人领域里的第一个合作伙伴,并且在其最新推出的机器人工程开发平台中也包括了对乐高NXT和RCX机器人支持。
下面我们就将要开始探索在微软机器人工程开发平台中使用乐高NXT机器人。
首先,让我们来看看,都有哪些机器人可以在这个机器人平台中运行,作为一款通用型的机器人工程开发平台,它可以支持乐高的NXT机器人、RCX2.0头脑风暴机器人和慧鱼机器人,除了这些教学上常用的机器人器材之外,微软机器人工程平台还支持许多特种机器人,甚至是工业机器人,例如,iRbot公司的Roomba机器人吸尘器,Kuka工业机器人,Robotsoft公司的移动机器人等。
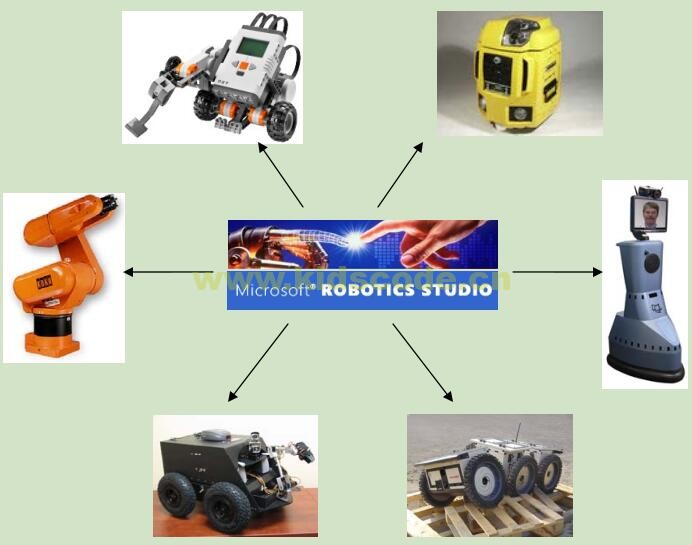
正因为其有着强大的通用性和兼容能力,用户不需要考虑机器人低层部分的硬件结构和驱动,根据自己的需要,只需通过几步操作,就可制造属于自己的机器人,降低了机器人开发的门槛,使得更多的人有机会去接触机器人的设计,并且,同样的程序不仅可以在NXT机器人上运行,甚至可以在RCX或其实的机器人执行,做到了一种与硬件无关联的编程方式,打个比方,通过微软机器人工程开发平台对于机器人的编程就像我们在Windows上操作计算机一样,例如程序员要编写一个光驱读盘的程序,他只需要在程序中调用几个读盘操作计算机一样,例如程序员要编写一个光驱读盘的程序,他只需要在程序中调用几个读盘的命令就可以将光盘中的数据读入到硬盘中,而无需对光驱中的马达和激光头做任何控制,而且我们是否发现,同样的程序是不是都可以在不同型号类型的计算机中运行呢?这一切的硬件操作都要归于安装在计算机中的Windows操作系统,是它根据程序所编写的指令,替我们完成了这一系列复杂的操作,因此,微软机器人工程开发平台就像我们使用的Windows操作系统一样,方便了更多人编写在计算机上可操控机器人的商用软件,这也意味着以后我们就可以通过智能型手机操控可爱的机器狗或清扫机器人。
了解了微软机器人平台的这些特点之后,就让我们来实际认识一下这个强大开发平台的组成部分,整个开发平台主要由三部分组成,包括:
基于.NET的服务运行时库(Services-oriented Runtime)
可视化编程工具(Visual Programming Language)
机器人3D仿真环境(Visual Simulation Environment)
本站内容未经许可,禁止任何网站及个人进行转载。