Drive To Bump 碰到障碍就停——对于 2 个马达的机器人,这个行为让机器人向前行驶到碰到障碍物的时候停止,通常触碰传感器指向前方。程序中的参数可以根据你的需要进行修改。
Drive To Dark 碰到黑线就停——对于 2 个马达的机器人,这个行为让机器人向前行驶到光线传感器检测到黑线的时候停止,通常光线传感器指向地面。程序中的参数可以根据你的需要进行修改。
以上 2 个行为用等待传感器图标实现了最简单的传感器控制方式, 程序在一直等待满足传感器条件,在此之前维持现有状态,在执行的时候存在任务单一的缺点,而且难以抑制机器人的惯性。例如在 Drive To Dark 行为中当机器人速度过快的时候可能停下的位置会超越黑线。
Robolab 提供了丰富的传感器图标:
![]()
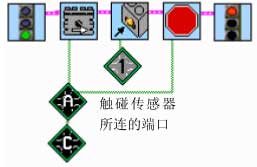
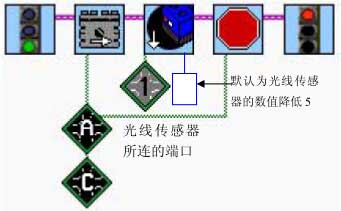
RCX 和 NXT 的等待触碰传感器图标,其中图标左下角的参数表示传感器所连接的传感器端口, 右下角的参数表示触碰传感器按下或弹起的次数,默认为 1 次。(如下图)

RCX 和 NXT 的等待光线光亮(暗)图标,前 2 个为等待光线变亮,而后 2 个图标等待光线变暗;其中,左下角的参数表示传感器所连接的传感器端口,右下角的参数表示光线的亮度参数, 对于 NXT 的光线传感器还有一个布尔参数控制辅助光源的开关“Light on?” , “T”表示打开; “F”表示关闭。可以通过右击鼠标 creat——constant 来进行设置。
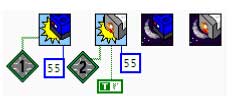
这组图标的用法与等待光亮(暗)的图标用法类似,只是右下角的参数表示光线传感器的亮度数值超过(降低)了多少。(下图)
![]()
这组图标关于温度的等待图标,有摄氏度和华氏度两种温度单位。(下图)
![]()
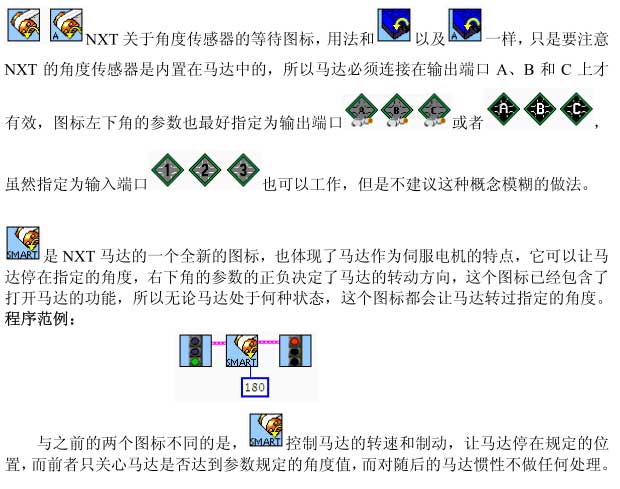
程序范例:

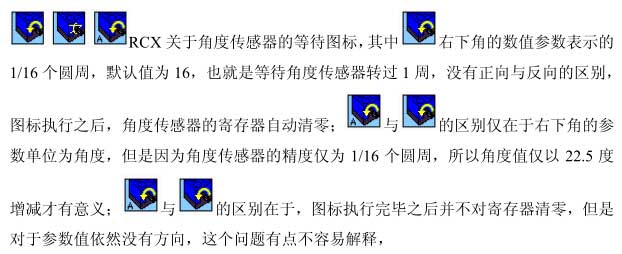
对于这段程序,第一次任意方向转动角度传感器 1 周后 RCX 都会鸣叫,在第二次等待之前角度寄存器自动清零,所以再次任意方向转动一周后,RCX 会第二次鸣叫。然而,对于下面这段程序:
第一次任意方向转动角度传感器一周会是 RCX 发出第一次鸣叫(View1 号端口显示 16 或者-16) ,接下来必须在第一转动的方向上再转一周才能发出第二次鸣叫(View1号端口显示 32 或者-32) ,如果在第一次转动之后改变了方向,那么第二次必须转动 3周才能发出第二次鸣叫。
![]()
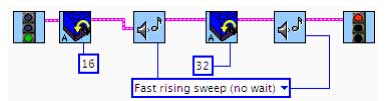
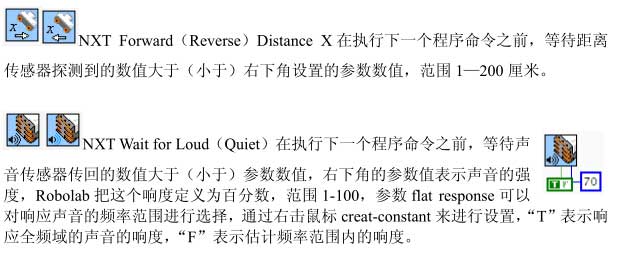
NXT Wait for Louder(Quieter)在执行下一个程序命令之前,等待声音传感器的数值增加(减少)参数数值。
本站内容未经许可,禁止任何网站及个人进行转载。