
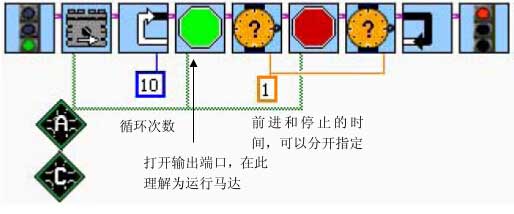
Lurch 走走停停——对于两个马达的机器人,这个行为让机器人前进一段时间 ho停止,然后再前进。这段程序让机器人的 A 和 C 马达前进 1 秒钟后停止 1 秒钟,重复10 次程序结束。程序中的参数可以根据你的需要进行修改。请小朋友们注意此点。
Snake 蛇形步伐——对于两个马达的机器人, 这个行为让机器人交替的左右前进,就像蛇一样。这段程序让机器人的马达 A 前进 C 后退,运行 1 秒钟之后马达 A 后退 C前进,重复执行 10 次。程序中的参数可以根据你的需要进行修改。

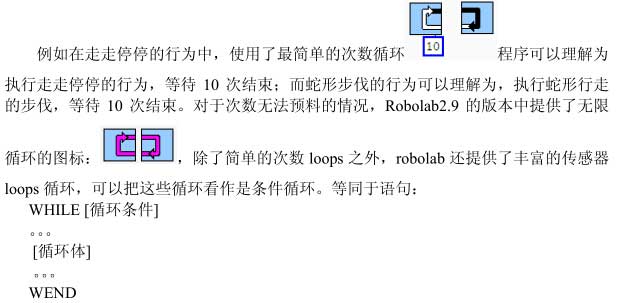
以上两个行为,用到了 loops 循环。与 wait for 程序图标类似,在条件不满足的时候程序执行循环体内的内容,直到条件满足才会执行 loops 之后的程序内容,当然,区别也是明显的,在 loops 的循环体之内,可以有不止一个图标,因此使用时的灵活性大大增强。图标等同于程序:For I=1 To N。 。 。[循环体]。 。 。
NEXT I

![]() 使用这个图标开始一个 loop 循环,当光线传感器返回的数值小于(大于) 设定参数的时候执行Loop的内容。 对于NXT的光线传感器可以设置 “light on?”参数打开辅助光源。
使用这个图标开始一个 loop 循环,当光线传感器返回的数值小于(大于) 设定参数的时候执行Loop的内容。 对于NXT的光线传感器可以设置 “light on?”参数打开辅助光源。
![]() 使用这个图标开始一个 loop 循环,当马达的角度传感器返回的数值小于(大于)设定参数的时候执行 Loop 的内容。通常使用之前要用
使用这个图标开始一个 loop 循环,当马达的角度传感器返回的数值小于(大于)设定参数的时候执行 Loop 的内容。通常使用之前要用![]()
图标对角度传感器进行清零。
![]() 使用这个图标开始一个 loop 循环,当温度传感器返回的数值小于(大于)设定参数(℃表示摄氏度、℉表示华氏度)的时候执行 Loop 的内容。
使用这个图标开始一个 loop 循环,当温度传感器返回的数值小于(大于)设定参数(℃表示摄氏度、℉表示华氏度)的时候执行 Loop 的内容。
 使用这个图标开始一个 loop 循环,当 NXT 距离传感器返回的数值小于(大于)设定参数的时候执行 Loop 的内容。
使用这个图标开始一个 loop 循环,当 NXT 距离传感器返回的数值小于(大于)设定参数的时候执行 Loop 的内容。
![]() 使用这个图标开始一个 loop 循环,当 NXT 声音传感器返回的数值小于(大于)设定参数的时候执行 Loop 的内容。
使用这个图标开始一个 loop 循环,当 NXT 声音传感器返回的数值小于(大于)设定参数的时候执行 Loop 的内容。
本站内容未经许可,禁止任何网站及个人进行转载。
















{kind=link}