1.机器人的简单行为
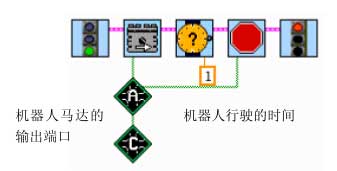
Go Straight 前进行为——机器人向前行驶一段距离。这段程序让马达 A 和马达 C前进 1 秒钟,然后关闭马达。程序中的参数可以根据你的需要进行修改。
Turn 转向行为——对于两个马达的机器人, 这个行为可以让机器人转过一定的角度。这段程序让机器人的 A 马达前进、C 马达后退,转弯 0.25 秒后停止。程序中的参数可以根据你的需要进行修改。

以上是最简单的程序范例,机器人行驶的距离和转弯时的角度都由等待时间来控制,在 robolab 中关于等待时间的图标还有:
等待固定的时间(下图)
![]()
等待设定时间,时间单位分别为 1/1000,1/100,1 秒和 1分钟,其中 1/1000 秒时 robolab2.9 版本中新增的等待时间图标,使得机器人工作的精确度有很大提高。
 等待随机时间,参数表示随机时间的范围,默认值为 5 秒内的随机时间。
等待随机时间,参数表示随机时间的范围,默认值为 5 秒内的随机时间。
本站内容未经许可,禁止任何网站及个人进行转载。