当你感觉能够胜任导航者1之后,你可以按BACK键,退出. 双击PILOT2进入其编程环境你会发现它比PILOT1级别复杂了一点,功能模块和可选图标均多了。同样,它是由绿灯开始,红灯结束;
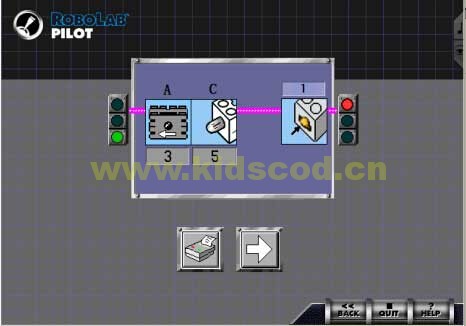
默认程序的功能为:开始时,端口 A 中的马达以能量 3 顺时针转动,同时端口 C 中的灯以能量 5 亮起来;当按下端口 1 上的触动传感器时,A,C 输出端口关闭,程序停止。

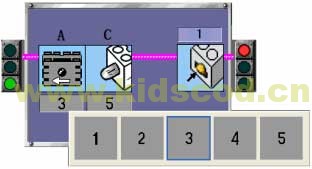
值得注意的是(上图),在导航者 2 级别中,你可以改变马达或者灯的输出功率,5 为最大功率,1 为最小功率.

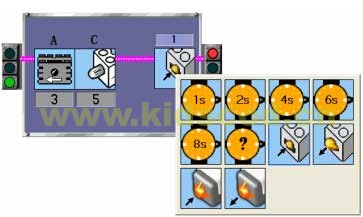 在导航者 2 级别中,等待条件除了时间以外,多了触碰条件(触碰传感器).
在导航者 2 级别中,等待条件除了时间以外,多了触碰条件(触碰传感器).

本站内容未经许可,禁止任何网站及个人进行转载。